我们已经研究了可以向前或向后推理的策略,但是这两个方向的混合适合解决复杂而大的问题。这样的混合策略,可以先解决大问题,然后再解决大问题组合中出现的小问题。这种技术称为Means-Ends Analysis。
手段-目的分析是人工智能中用于限制人工智能程序搜索的问题解决技术。
它是向后和向前搜索技术的混合。
MEA 技术于 1961 年由 Allen Newell 和 Herbert A. Simon 在他们的问题解决计算机程序中首次引入,该程序被命名为通用问题解决程序 (GPS)。
MEA 分析过程集中于评估当前状态和目标状态之间的差异。
手段-目的分析过程可以递归地应用于一个问题。它是在解决问题中控制搜索的一种策略。以下是描述 MEA 技术解决问题的工作的主要步骤。
首先,评估初始状态和最终状态之间的差异。
选择可以应用于每个差异的各种运算符。
在每个差异处应用算子,这减少了当前状态和目标状态之间的差异。
在 MEA 过程中,我们检测当前状态和目标状态之间的差异。一旦出现这些差异,我们就可以应用运算符来减少差异。但有时可能无法将运算符应用于当前状态。所以我们创建当前状态的子问题,其中可以应用算子,这种选择算子的反向链接类型,然后设置子目标来建立算子的前提条件,称为算子子目标。
我们以当前状态为 CURRENT,目标状态为 GOAL,接下来是 MEA 算法的步骤。
第 1 步:将 CURRENT 与 GOAL 进行比较,如果两者之间没有差异,则返回 Success 和 Exit。
步骤2:否则,选择最显着的差异并通过执行以下步骤来减少它,直到发生成功或失败。
选择一个新的适用于当前差异的算子O,如果没有这样的算子,则信号失败。
尝试将运算符 O 应用于 CURRENT。对两种状态进行描述。
i) O-Start,一种满足 O s 前提条件的状态。
ii) O-Result,如果在 O-start 中应用 O 将导致的状态。
如果
(First-Part <------ MEA (CURRENT, O-START)
And
(LAST-Part <----- MEA (O-Result, GOAL) )成功,则发出成功信号并返回结果结合FIRST-PART、O 和LAST-PART。
上面讨论的算法更适合解决简单的问题,不足以解决复杂的问题。
让我们举一个例子,我们知道初始状态和目标状态,如下所示。在这个问题中,我们需要通过寻找初始状态和目标状态之间的差异并应用算子来获得目标状态。
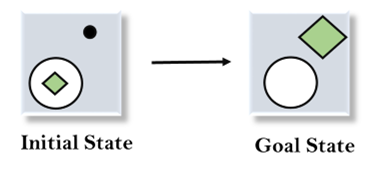
为了解决上述问题,我们首先要找出初始状态和目标状态之间的差异,对于每个差异,我们将生成一个新状态并应用算子。我们针对这个问题的操作符是:
移动
删除
扩张
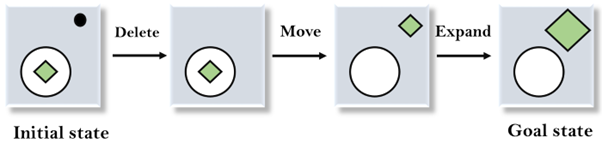
1. 评估初始状态:在第一步中,我们将评估初始状态,并将比较初始状态和目标状态以找出两种状态之间的差异。

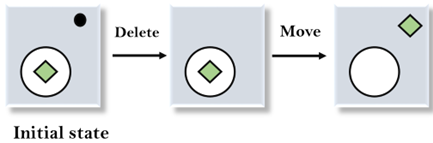
2.应用Delete算子:我们可以检查第一个区别是在目标状态下,初始状态中没有点符号,因此,首先我们将应用Delete算子删除这个点。

3. 应用移动算子:应用删除算子后,新状态出现,我们将再次与目标状态进行比较。比较这些状态后,还有一个区别是正方形在圆外,因此,我们将应用移动运算符。
4. 应用扩展算子:现在在第三步中生成了一个新状态,我们将这个状态与目标状态进行比较。比较状态后,还有一个差异,就是正方形的大小,所以,我们将应用Expand operator,最后,它会生成目标状态。